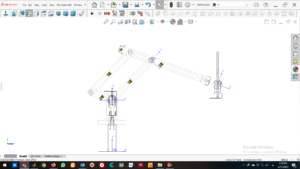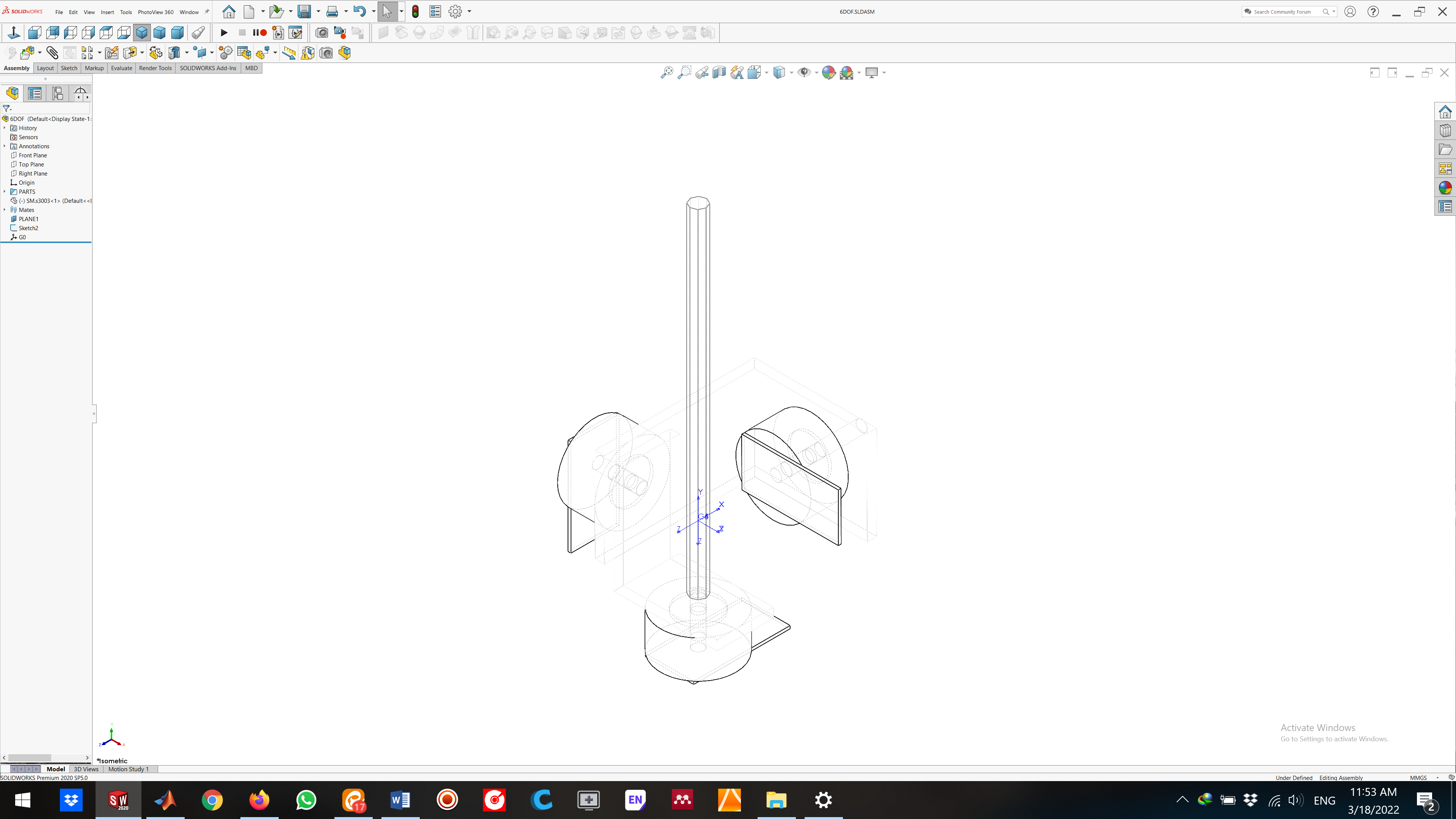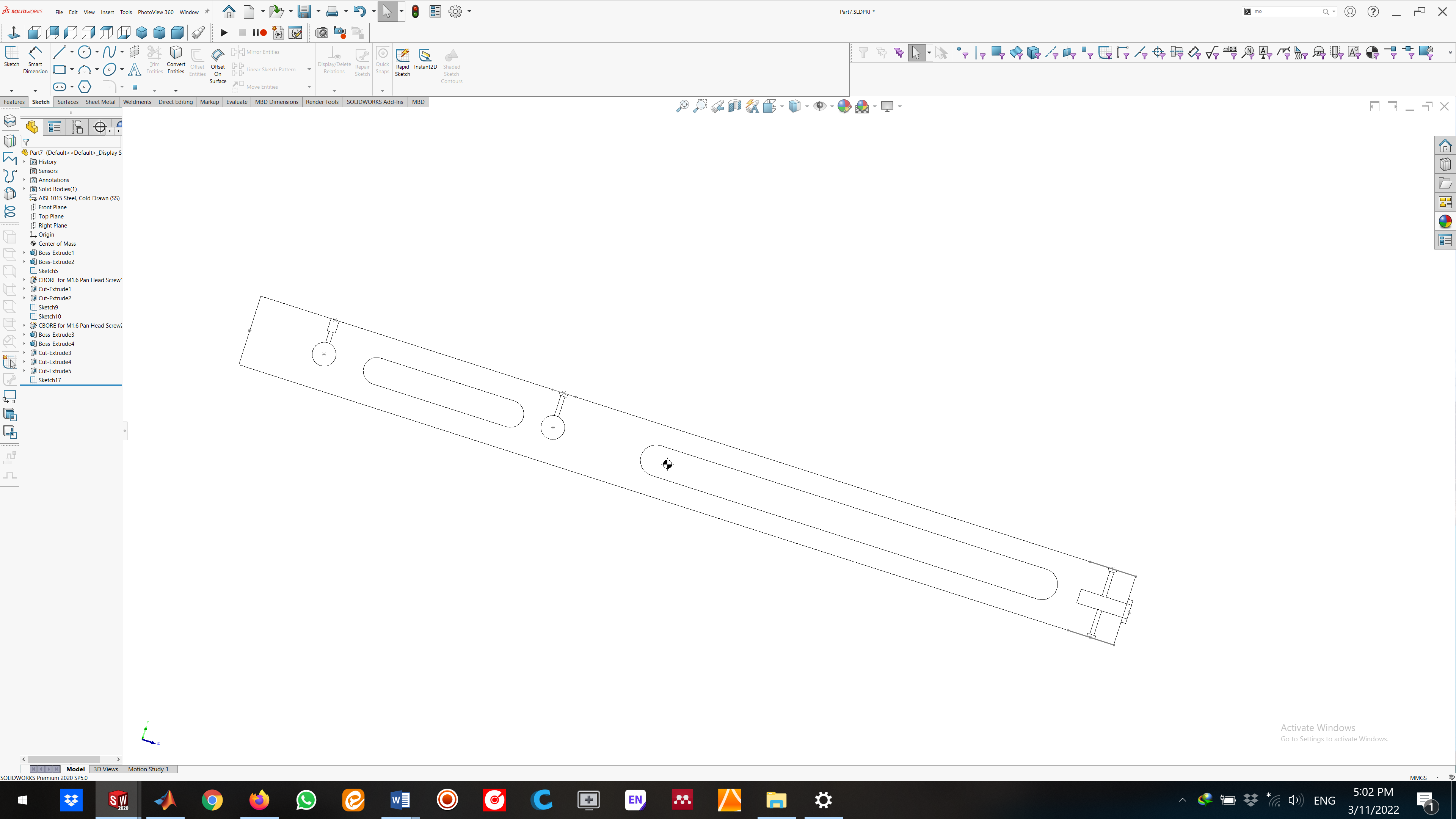
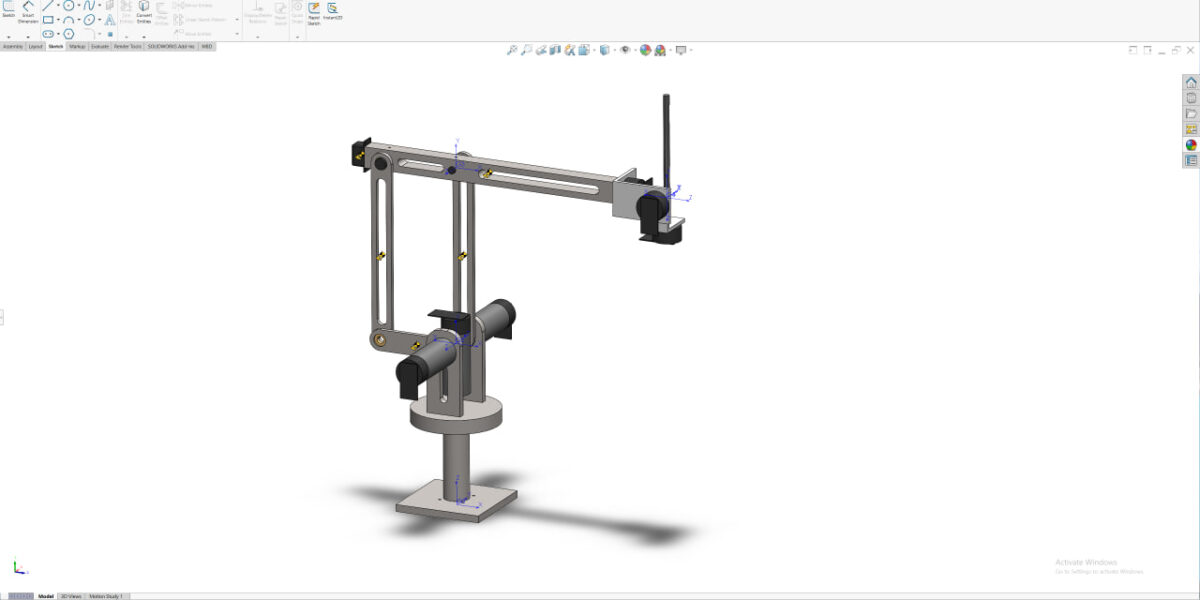
- نام پروژه: طراحی مکانیزم شیش درجه ازادی هپتیکی
- موقعیت مکانی: تبریز
- سال تکمیل پروژه: 1399
- مهندس اجرایی: مهندس امیررضا قلندرزاده
در این تحقیق یک وسیله هپتیکی شش درجه آزادی بازویی با آرایش بازو های موازی با سه درجه آزادی فعال و سه حوزه درجه آزادی غیر فعال طراحی و ساخته شده است. در این طراحی ابتدا پارامترهای اساسیی که می بایست برای ساخت یک وسیله هپتیکی مد نظر قرار دارد تعیین شه، و سپس بر اساس آنها طراحی صورت گرفته است. درگام بعدی تلحیل های سینماتیکی، استاتیکی و دینامیکی بر روی مکانیزم طراحی شده صورت گرفته و ماتریس های تبدیل و ژاکوبین و معادلات تعادل استاتیکی برای مکانیزم استخراج شده است. سپس مدل دینامیکی مکانیزم شبیه سازی شده و یک برنامه کنترلی مدار باز بر روی مدل دینامیکی پیاده سازی شده است. سپس وسیله هپتیکی ساخته شده و ارتباط آن با محیط مجازی در کامپیوتر برقرار شده است و در نهایت نتایج بدست آمده از نحوه عملکرد مدل شبیه سازی و نمونه ساخته شده با یکدیگر مقایسه شده و توانایی مکانیزم مورد ارزیابی قرار گرفته است. در نهایت مکانیزم ساخته شده یک وسیله هپتیکی با کارایی بالا و کاربردی وسیع برای پیاده سازی نتایج انواع تحقیقات در زمینه واقعیت مجازی مانند شبیه سازی جراحی استخوان در محیط مجازی می باشد.